Salidas digitales#
Las salidas digitales son una forma de interactuar con el mundo exterior. En la mayoría de los microcontroladores, las salidas digitales se utilizan para encender o apagar LEDs, activar relés, controlar motores y más.
Truco
Open-drain y Open-collector
Algunos microcontroladores tienen salidas de drenaje abierto (open-drain) o colector abierto (open-collector). Estas salidas son útiles para la conexión de dispositivos de alta corriente o para la comunicación bidireccional.
Open-drain: La salida puede conectarse a tierra (GND) pero no a VCC.
Open-collector: La salida puede conectarse a VCC pero no a tierra (GND).
Advertencia
MicroPython no se encuentra disponible para la placa de desarrollo Cocket Nova su ejemplo es solo para SDCC.
Parpadeo (blink)#
Un parpadeo de LED es un proyecto común para comenzar con microcontroladores. Lo que no te dicen es la equivalencia de un parpadeo en diferentes plataformas. Para Arduino IDE, MicroPython o SDCC puede difererir en la cantidad de líneas de código, pero el resultado es el mismo: un LED que parpadea.
Truco
Con frecuencia, las tarjetas de desarrollo tienen un LED integrado en un pin específico, como el pin 13 en Arduino Uno o el pin 25 en Raspberry Pi Pico.
Figura 10 RGB_LED#
MicroPython y Arduino IDE#
Nota
En el siguiente ejemplo, se utiliza el pin 25 para el LED en la placa de desarrollo DualMCU RP2040. Modifica el pin según la placa de desarrollo que estés utilizando.
from machine import Pin
import time
led = Pin(25, Pin.OUT)
while True:
led.value(1)
time.sleep(0.5)
led.value(0)
time.sleep(0.5)
#define LED_BUILTIN 25
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(500);
digitalWrite(LED_BUILTIN, LOW);
delay(500);
}
Arduino IDE y SDCC#
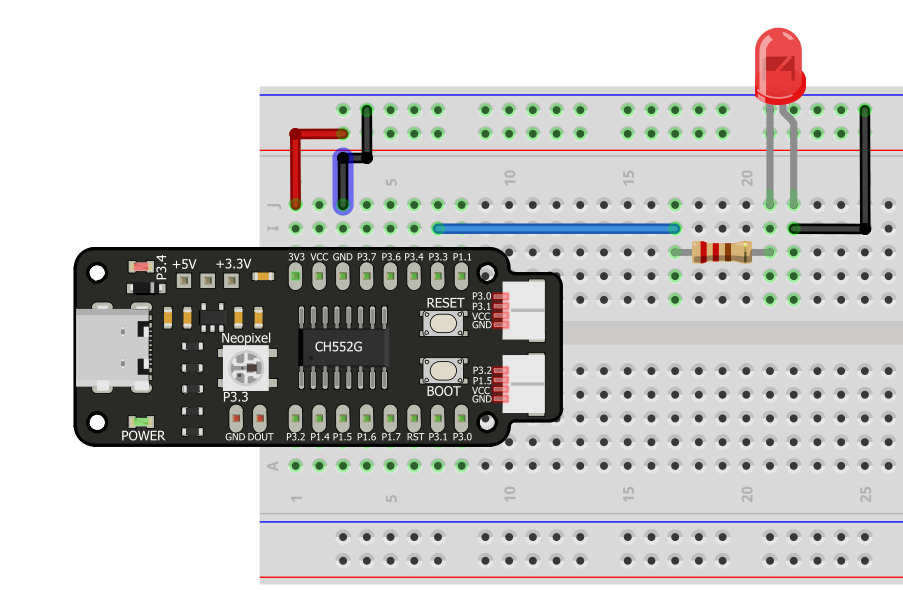
Figura 11 LEDs#
#define LED_BUILTIN 34
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
}
void loop() {
digitalWrite(LED_BUILTIN, HIGH);
delay(500);
digitalWrite(LED_BUILTIN, LOW);
delay(500);
}
#include "src/system.h"
#include "src/gpio.h"
#include "src/delay.h"
#define PIN_LED P34
void main(void)
{
CLK_config();
DLY_ms(5);
PIN_output(PIN_LED);
while (1)
{
PIN_toggle(PIN_LED);
DLY_ms(500);
}
}
Modulación por ancho de pulso (PWM)#
La modulación por ancho de pulso (PWM) es una técnica utilizada para controlar la cantidad de energía entregada a un dispositivo. En los microcontroladores, el PWM se utiliza para controlar la velocidad de los motores, el brillo de los LEDs y más.
Advertencia
El soporte de ubicación para salidas PWM depende de la placa de desarrollo. Revisar la documentación de la placa para conocer los pines PWM disponibles.
Implementación#
MicroPython y Arduino IDE#
from machine import Pin, PWM
import time
pwm = PWM(Pin(25))
pwm.freq(1000)
while True:
for duty_cycle in range(1024):
pwm.duty(duty_cycle)
time.sleep(0.01)
void setup() {
pinMode(9, OUTPUT);
analogWrite(9, 128);
}
void loop() {
for (int i = 0; i <= 255; i++) {
analogWrite(9, i);
delay(10);
}
}
Arduino IDE y SDCC#
#include <stdio.h>
#include "src/config.h"
#include "src/system.h"
#include "src/gpio.h"
#include "src/delay.h"
#include "src/pwm.h"
#define MIN_COUNTER 10
#define MAX_COUNTER 254
#define STEP_SIZE 10
void change_pwm(int hex_value)
{
PWM_write(PIN_PWM, hex_value);
}
void main(void)
{
CLK_config();
DLY_ms(5);
PWM_set_freq(1);
PIN_output(PIN_PWM);
PWM_start(PIN_PWM);
PWM_write(PIN_PWM, 0);
while (1)
{
for (int i = MIN_COUNTER; i < MAX_COUNTER; i+=STEP_SIZE)
{
change_pwm(i);
DLY_ms(20);
}
for (int i = MAX_COUNTER; i > MIN_COUNTER; i-=STEP_SIZE)
{
change_pwm(i);
DLY_ms(20);
}
}
}
#define led 34
int brightness = 0;
int fadeAmount = 5;
void setup() {
pinMode(led, OUTPUT);
}
void loop() {
analogWrite(led, brightness);
brightness = brightness + fadeAmount;
if (brightness <= 0 || brightness >= 255) {
fadeAmount = -fadeAmount;
}
delay(30);
}
Aplicaciones#
Control de servomotores - MicroPython RP2040#
Los servomotores son dispositivos que se utilizan para controlar la posición de un objeto. Se utilizan en aplicaciones como robots, drones, juguetes y más.
Requieren de una señal PWM para controlar la posición del eje del motor. La mayoría de los servomotores aceptan una señal PWM con una frecuencia de 50 Hz y un ciclo de trabajo de 0.5 ms a 2.5 ms.
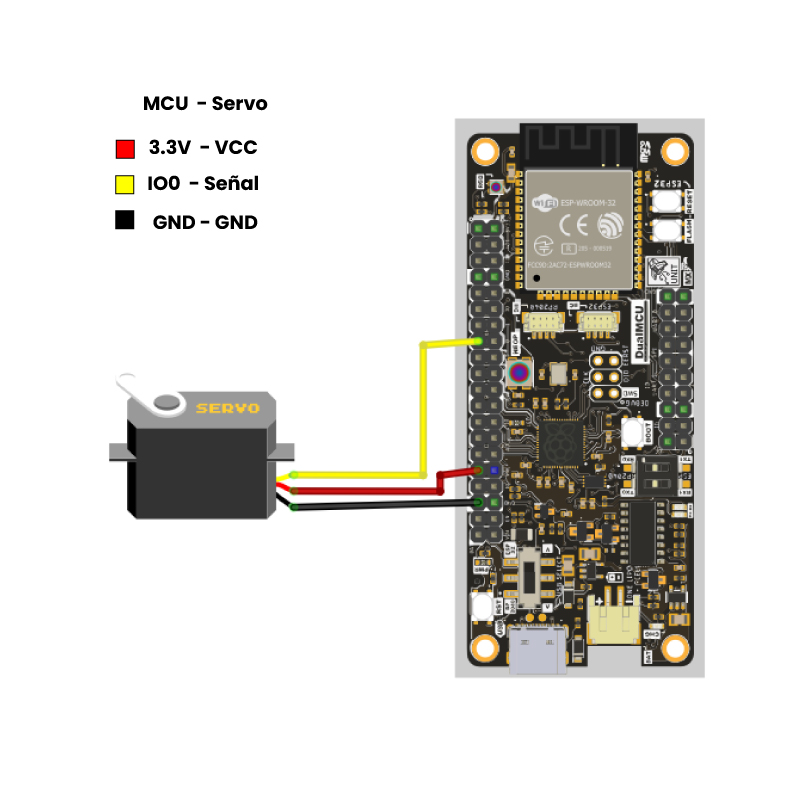
Figura 12 Diagrama de conexión del servomotor#
import machine
import utime
servo_pin = machine.Pin(0)
pwm_servo = machine.PWM(servo_pin)
pwm_servo.freq(50)
def set_servo_angle(angle):
duty_cycle = int(1024 + (angle / 180) * 3072)
pwm_servo.duty_u16(duty_cycle)
try:
while True:
for angle in range(0, 181, 10):
set_servo_angle(angle)
utime.sleep(0.1)
for angle in range(180, -1, -10):
set_servo_angle(angle)
utime.sleep(0.1)
except KeyboardInterrupt:
pwm_servo.deinit()
print("\nPWM detenido. Recursos liberados.")
#define SERVO_PIN 0
void setup() {
pinMode(SERVO_PIN, OUTPUT);
}
void loop() {
for (int i = 40; i <= 115; i++) {
analogWrite(SERVO_PIN, i);
delay(500);
}
}